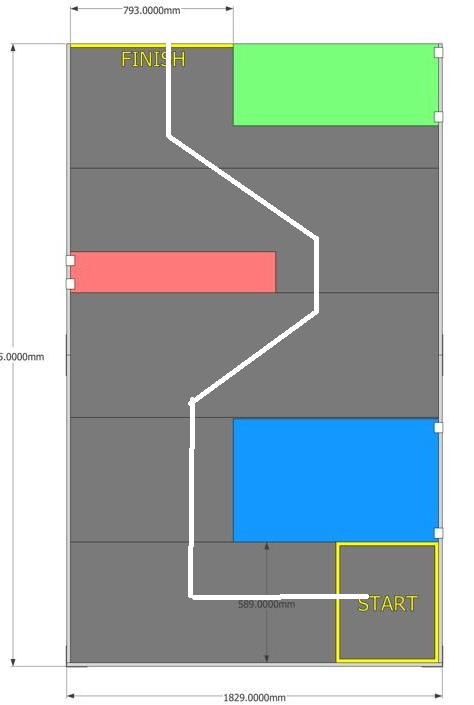
This challenge is a zig zag course through coloured barriers described here Escape Route – Pi Wars.
It's described as a maze but really there aren't any alternative routes other than to the end so it isn't really. The picture above is a mock up just to test general algorithms of following a similar course made of blocks that just happened to be made up for our robot workshop this year. The course can be run up to three times in five minutes with points for each run and fastest run.
There are three methods allowed, fully autonomous, which I'm certain we'll be aiming at (a basic video of this in a later blog), blind remote control (with again a video later) and remote control with relayed commands, where the 'driver' can't see the robot or route and has the necessary directions given to them by someone else who can, and 'call and response', where the robot is remote controlled by a person being given instructions from a second person, only the second person being able to see the course and robot position.
Autonomous is what it is, but for remote control then the communications must be rock solid in what will otherwise be a very noisy environment electrically. This may also adversely affect the video link which most likely will be over wi-fi. As the remote control and 'call and response' both require good communications be essential for control, using a dedicated RC system or a Bluetooth controller might be the best option. Video streaming over Wi-Fi is well supported, but if not practical or reliable on the day, then at least the RC will be. Video is the described navigation choice for 'Remote Control', but a feed of data from, say, a collision detector might help enormously.
From a points perspective, completing the run scores 200 each time, or 600 for 3 completions. Not touching the walls scores an additional 100 points per run, so 900 in total for thee clean runs. For just taking on the course autonomously, 350 points are awarded, so even if your robot isn't up to it, entering autonomously and just crashing without completing any runs should be fine for some points!!! Remote control entrants get 250 points extra and 'call and response' entrants an extra 100 points. There are no points penalties for crashing/recovery etc, but the fastest robots are awarded points based on the formula system described here Formula Scoring System – Pi Wars. Thus, three clean complete runs autonomously scores 1250 with a potential extra 150 for fastest meaning a total of 1400 available. Competently doing call and response will earn a team 1000 points, plus any formula points for speed, but at least 70%. Getting this right means that a robot can do very well and any attempt at autonomous operation or 'remote control' could be abandoned closer to the day with good results.
There are coloured walls, but their colour won't be of much use to a robot unless someone is determined to be fastest. As with lava palaver, a fixed set of navigation routines could be coded to do the basic steering with additional collision avoidance added. A basic routine set might be:
- Drive_forward_until_wall_10cm_away
- Turn_90degrees_Right
- Drive_forward_until_wall_10cm_away
- Turn_90degrees_Right
- Drive_forward_until_wall_10cm_away
- Turn_90degrees_Left
- Drive_forward_until_wall_10cm_away
- Turn_90degrees_Left
- Drive_forward_until_wall_10cm_away
- Turn_90degrees_Right
- Drive_forward _until_wall_10cm_away (a hand placed in front when collecting robot at end)
- Stop
This would give the following route.
Driving forward in a straight line might be the bigger challenge, and putting a limit at 10cm is just an example guess, any robot needs to be tested to verify it's turning capability and as the measurements of the course are known, the turning trigger distance might be much more on horizontal runs. This is also reliant on dead reckoning but the course isn't complex so fine tuning a robots steering should get close.
The above might get a reliable result, but to get the fastest time will require a more irregular route. The obstacles on the course have a different width as well as colour, so a determined robot could steer a course based on knowing and using this information, as well as using some additional wall following sensors, possibly already installed for lava palaver.
Only a team can decide how much they want to be fastest, but getting the basics right will do very well and this example route above might be close to the route of the fastest robot and 1400 points. Getting the scripted run right would be 1250 points, almost 90% of the max.
Finally, a robot recording it's successful runs could replay them at a faster pace to get that extra speed and points.
So now there's a few routines to write and videos to make, as well as looking at the Minesweeper challenge.