While a lot is happening, somehow there's never much to see for all the effort, but at our last PiWars get together we had the start of our arena to view.
It's made out of flooring board so can be dismantled into three parts and we've marked it out in 250mm squares to start getting the feel for what the space looks like. No apple tree on view, but some test cardboard sheep and wolves, together with our newly made cattle troughs, fill up the space.
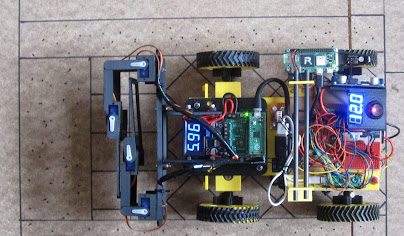
It was also an opportunity to look at motor speeds and load capacity. This robot is our test bed for a set of four brushless motors. We've loaded it up at the front with a 1kg weight to simulate a full load of cattle feed (rice) to see what its performance is.
So speed tests put the crossing of the arena from standing start to stop at 2 seconds with the full load, which we're happy with. None of the attachments are very heavy so we're ok to go. Might need a bit more grip on the wheels to get better acceleration and ensure a skid free stop, but the work we described in the last blog has paid off, so success. A small accident in control during one of the tests demonstrated it also turns very quickly as well!
Also on demonstration on the arena are the navigation beacons.
These will be used by the vision cameras on the robot chassis to give an accurate position within the arena and provide the navigation references. This picture shows three coded beacons but the arena will be surrounded by them eventually.
As well as the tea and biscuits, a quick view of the kitchen table gives an overview of what's been going on.
In the foreground on the far left is the time synchronisation test rig to provide an accurate common time reference to the independent stereo cameras.
Beside it in yellow and black, is the modified cattle feed hopper, extended at the top to hold more feed, and fitted with a large drum to deliver feed to the trough faster. Also shown are two other hoppers in green with out the capacity extension. The need for the extension followed tests with the accurate 3D printed troughs showed that we hadn't been delivering enough feed to the trough to cover the centre line so we needed to increase the amount. We could have designed some sort of shaking device to even out the feed in the trough but just increasing the amount was faster and unsophisticated.
Between the two green hoppers is the new turntable to rotate hoppers over the side of the robot chassis for dispensing, and then returning them to an inboard position to keep the weight distribution within the robot wheels.
At the rear is a yellow test robot chassis powered by an ESP32 which is used to test attachments and in front of that a pair of arms for gathering and gripping sheep. We found that the cardboard sheep we'd made were actually to big and so the arms couldn't quite reach round them! It also used fairly low cost servos which didn't perform well, so will need a bit of an upgrade before the next demonstration, as well as the lift mechanisms fitting with the new stepper motors.
Next meet will be a test of the Hungry Cattle challenge with remote control, progress!
Finally just another picture of the arena with bits in place. We had made three wolves and six sheep but two sheep were lost, but we put them in place anyway.
Also on show are the beacons, troughs, stereo cameras, and four test bed chassis!!!!!