Lots of things happen when we get together, lots of ideas passed around and a few demonstrations.
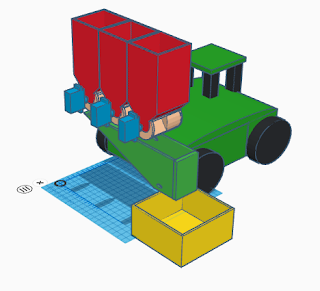
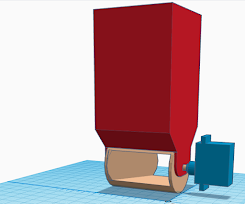
First up was the Hungry Cattle hopper and filler. This had been interrupted by a dodgy 3D printer hotend, but soon fixed and construction completed.
The wooden bit is just for demonstration. It was duly loaded with the cheapest rice we could find and tested out. This is a video of a couple of runs, the first in real time, the second in slow motion.
Generally very happy with this, but improvements to be made. One big one is to automatically close the hopper after emptying, to prevent the accident had later, of pouring rice into an open hopper and subsequently all over the bench and floor, important for when we do the real run as well so that the robot is ready for refill as soon as possible. Another is to add indicator lights to show open and closed statuses, this may be just a physical switch changing coloured LEDs but giving feedback on status. The final change would be the use of a centralised hopper below the three currently planned so that the robot only has to position one feed outlet.
This layout would also help with detecting trough position to ensure that the robot releases when the hopper is above the trough. This is getting to be quite a big attachment!
Next up we had a look at the
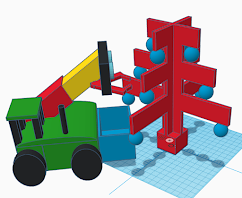
Nature's Bounty challenge. We had already had a look individually at a solution to this challenge but now was the opportunity to collectively look at the size of robot and the size of the tree.
A demo of a trough to hold collected apples in was examined and the ease, or otherwise of catching and storing apples soon became interesting. The apples themselves are also part of the problem, and for the time being in the project, they are polystyrene balls. They are lightweight, can be gripped from any angle and don't bounce much when dropped, so are easier to control. The plan is to colour these and attach them to the tree using steel washers and magnets. So here's a clutch of 'apples' in a trough and cue lots of dropping apples off the tree.
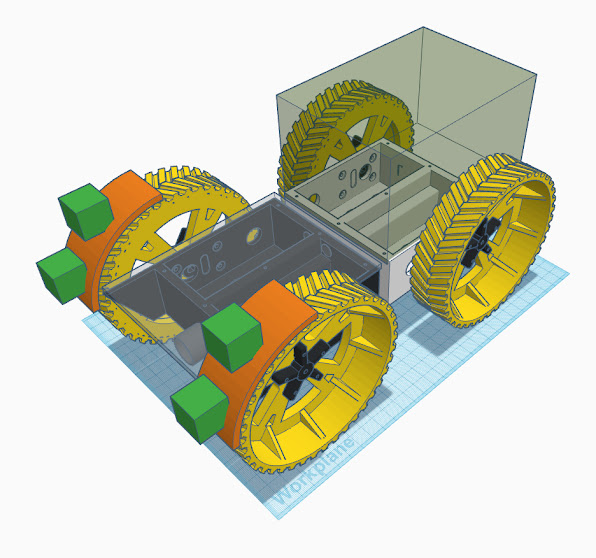
Out of this came a new solution, putting the trough underneath the robot.
Not sure if this will take off yet, but it does fix a few problems, and unloading might need a door and drawer at the rear!!!
The strategy of storing picked apples now having direction, the approach to actually picking the apples was looked at, also lots of fun, each of us pretending to be robots picking apples and how they would go about it.
Three obvious approaches to the tree were looked at as follows.
This one doesn't take much imagination, drive up to the tree branches at 90 degrees and pick. Being at right-angle to the branch means the apples are in an easy position to pick, and the robot chassis can be aligned easily.
This second one goes in diagonally. This is much more difficult as it needs to approach the tree at an angle meaning more complex navigation, and the robot would need to be aligned to the tree axis. But it does allow for the possibility of picking two branches without relocating the robot chassis, which would make it faster.
Picking 'end on' to the tree branches lends itself to removing one dimension from the picker, that of moving left or right, which the other positions required, as well as in/out and up/down. It is difficult to achieve within the competitions dimensions rules but that's part of being inventive. Someone building a robot with mecanum wheels might even be able to drive in a circle, picking as they go.
No final design was agreed upon, someone taking away the task to draw up the picker configuration for next time.
We had a quick demonstration of the StereoPi in operation mounted on the robot chassis, it looks good, but the demands of the chassis designer are high and they aren't satisfied. More on this another day.
We talked about the first challenge
Shepherds Pi, but this is a real agility test for a robot, and we decided to leave it to another day when the chassis is a bit more advanced and we can experiment with moving around the arena in remote control, rather than just theorise about solutions.
The fourth challenge,
Farmyard Tours, got lots of ideas, and we agreed to go off and submit them as emails to gather them all together, it's unlikely that much will be said about these here for the time being unless we can't do them!!!!
Finally, a key piece of design was agreed upon, the attachment mounting. This is important
so we all know what we are designing to, and basically its four mounting holes on an 80mm grid on an 90mm plate.
The lugs on top aren't part of the specification, they're just there to aid mounting an attachment, in this case the Hungry Cattle hoppers.
And that's it for another week, the hopper controller has already been built on Arduino, but needs migrating to Pico, we're all getting back together to see the apple picker design after the next Raspberry Jam, and the next meeting will have a run through of the Shepherds Pi challenge, probably in slow motion as none of us are RC experts!!!