While we're all busy with different things, somehow we get new ideas for PiWars challenges. So we have a new Hungry Cattle hopper design, this time both a measure, and also a funnel to direct the feed to the trough.


This design is to have a single hopper dispensing a measured amount of feed only into the trough. The main hopper is 122 x 100 x 104mm and the cylinder, which can rotate through 360 degrees, is 62 x 100mm long.
In addition to considering a new hopper, there's also the idea of a side funnel to direct the feed independent of the hopper position.


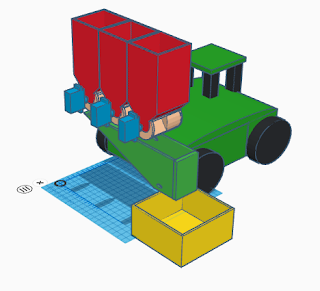
With this addition, the current chassis can drive up alongside the trough, dispense the feed, and then drive on saving time. Using the central front hopper only, the chassis has to drive up to the trough, dispense the feed, and then manoeuvre away from the trough, all of which is extra navigation.
Thinking of a decoration for the arena, instead of just plain cardboard, or MDF, a colour scheme.

This looks a bit more field like, as well as having the useful 250mm grid lines for laying out the challenges. Not sure about having muddy pools yet!
When it comes to thinking about a challenge, we can be very analytical, so here are a few diagrams ahead of our full apple picker design.

This is a chassis and attachment volume model showing the extents that a any given design can occupy.

Applying this to the apple tree, we can view the approach distances and develop a strategy.

From this we can then design the apple picker to fit the strategy, QED :)
We did lots of clever software work as well, write up on that next time.



No comments:
Post a Comment