The challenges for the competition are published here https://piwars.org/2022-competition/challenges/ These are some of our thoughts! I'm sure we will wander off in a completely different direction eventually.
East
Devon Pirates PiWars 2022
Competition
analysis for robot – ZyderBot
The competition has varied in complexity over the years and
this year has perhaps provided the most complex challenges.
There are six challenges, two of which are
presentation/documentation challenges which we should complete, the blog has
already been started and needs regular updates on progress, closer to
completion, the technical/artistic merit video must be created.
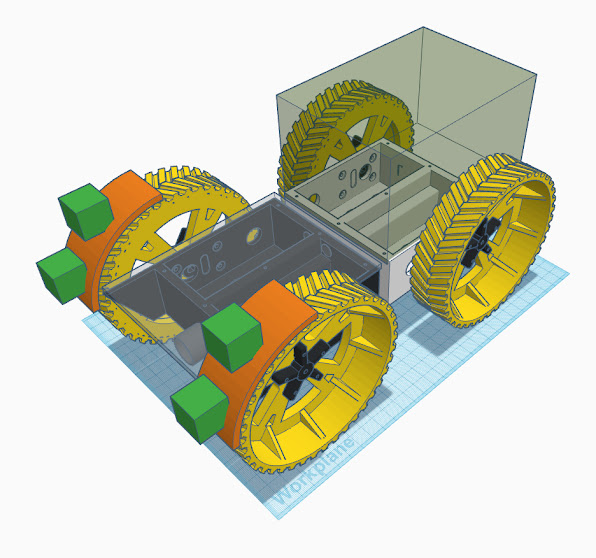
A competition robot consists of a base chassis to which attachments
are fitted to perform the challenges, and the 2022 challenges all require
different attachments to be fitted, though it is possible to design a single
chassis to perform all challenges, this would not be competitive, not being
optimised for any one challenge.
The competition organisers specify chassis dimension
limitations, copied here for laziness.
The maximum height is 400mm or 500mm with attachment.
The chassis must carry the main power supply, controller,
motive power with ground contact and chassis navigation. It is the main support
for all attachments and is used to transport them around the arena. In
addition, it must provide connectivity for power and signals to any attachment
requiring them as well as a remote control facility.
The chassis must provide a mounting system for attachments
which is compatible with the attachments used.
The chassis navigation system must be compatible with the
attachments required but will also have to work with additional sensors
associated with attachments, such as fruit identification in the picking
challenge.
To be competitive in PiWars 2022, the following are
requirements.
The chassis must be able to complete each of the arenas
challenges autonomously.
The chassis needs to be able to maintain a speed of 500mm/s,
including sensor/navigation delays and corners of 200mm radius (reference
PiWars 2021 robot performance). Controllable performance in excess of this
would be an advantage.
The chassis must be able to position itself accurately to
within 12.5mm of a target position. This may be flexible but is supplied as a
value by subtracting the maximum width of a robot from the width of the pen
door in challenge Shepherds Pi. Typically it must be more accurate than that
for competitive speed.
The chassis must carry a sufficient power supply to run the
robot for up to 5 minutes with working attachments. This will vary with the
challenge, and with challenge 4, the farm tour, the length and intensity of the
course.
In previous years, the chassis was the key element being
judged, but recently this has changed. Design of the chassis will undoubtably
evolve during development of the challenge attachments, and for this reason a
prototype with limited performance and primarily remote control usage might be
better in the early stages of the project until the attachments are fully
functional, perhaps running at ¼ to 1/5 competition speed.
There are 4 robot challenges which are detailed on the
PiWars website but some details are reproduced here for easy reference.
Shepherds
Pi
Time analysis
The instructions for this challenge only state that competitors
should AIM to complete the course three times in 5 minutes. This
needs clarification.
The course will be setup originally and will require
resetting twice, once between each of the three runs. The course is not complex
and the components only have to be placed on the arena at marked positions, the
estimate is that each reset will take 30 seconds leaving 4 minutes of run time
or 80 seconds per run.
Observations
The distance between wolves is 283mm so should be easily
navigated by a robot with the precision noted previously.
The distance between wolf C and the enclosure is 150mm so a full-size
robot either cannot negotiate that gap or must move the wolf. Moving a wolf
will incur a small competitive time disadvantage but may reduce the time to
round up the sheep.
The gate opening is not a requirement but gains additional
bonus points. If a gate is fitted, then it must be closed as a separate
operation incurring a competitive time penalty. Closing the gate can be
achieved easily by pushing it closed, but opening will require an attachment.
A gate opened left to right will pass wolf C with a good
margin so can be opened fully, a gate opened right to left cannot open fully
unless wolf C is moved. An open gate could be used as a guide to enter the
enclosure.
When putting the sheep into the enclosure, the width of the enclosure
can only accommodate three sheep before they have to be moved to one side to
allow further sheep to be added. An attachment may be required to move the
sheep sideways in the enclosure. Moving the sheep will be a necessary time
slot.
Making assumptions that suitable attachments are designed
and fitted, sheep 1-3 could be rounded up collectively and parked by the edge
of the arena. At full competitive speed this might take 10 seconds. The gate is
opened using chassis movement and an attachment which might assist. 10 seconds.
Sheep 1-3 are collected from the side and moved into the enclosure, taking 10
seconds and then moved to one side, 5 seconds. Total to move sheep 1-3 into
enclosure 35 seconds.
Decision to move wolf – no movement
The robot moves through gap wolf B-C and collects sheep 6.
10 seconds, moving forwards collects sheep 5 then 4. 10 seconds, Continuing
round wolf A and directly into the enclosure, carefully avoiding wolf C, 15 seconds.
Close gate 5 seconds. 40 seconds.
Total 75 seconds
Decision to move wolf – move against enclosure.
Using the sheep attachment, the robot moves the wolf against
the enclosure wall, where it is unlikely to fall over. 7 seconds. The robot
moves through gap wolf B-C and collects sheep 6. 10 seconds, moving forwards
collects sheep 5 then 4. 10 seconds, Continuing round wolf A and directly into
the enclosure (at full speed due to no wolf), 10 seconds. Close gate 5 seconds.
42 seconds.
Total 77 seconds
This indicates that there is little time margin between
moving a wolf and not, but there is the advantage that moving the wolf reduces
the navigation burden.
Both estimate timings are within the 80 seconds per run
limit.
The attachment must be able to handle 3 sheep at the same
time, but with an attachment plus extension limit of 200mm, 25mm of a sheep
will protrude beyond any attachments capacity and must be retained in some way.
The weight of sheep and wolves is not specified, so in
construction, weight distribution should put additional weight in the base of each
to add stability and the chassis and attachment built to accommodate it.
There are bonus points for opening and closing the gate each
time, in these scenarios this would add 10 seconds so is only an option if the
run time can be reduced.
Collecting the sheep singly is not an option within these
timings.
Collecting the sheep in pairs is not an option within these
timings.
Additional bonus points are available for using a whistle
control and for recognising wolf and sheep using photographic recognition which
is probably essential if not moving wolf C.
Attachments
This challenge is about moving objects around the arena as
an obstacle course and the attachments are there to facilitate that.
If a single ‘move’ attachment is to be used, then it must be
able to adapt to either sheep or wolf.
In order to move the sheep as quickly as possible, and to
facilitate their movement within the enclosure, an attachment must be able to
control three sheep at the same time and reach over the top of the enclosure. Imaging
must be on the attachment to ensure that sheep are moved reliably, and perhaps
use of a tupping marker on the rear of the sheep may help. Navigation by the
chassis will need to be located such that it is not obstructed by the attachment
and does not inhibit the attachments operation.
An attachment is needed to open and close the gate and this
may require a separate vision system or reuse one of the others.
An attachment must also receive whistle commands and relay
them to the controller, though this may be a built-in to the chassis.
This is not a stop/go challenge and there needs to be
continuous communication between chassis and attachments as to what is
happening and when.
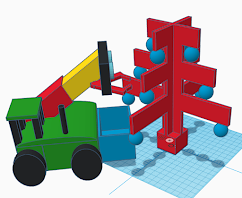
Nature’s
Bounty
Time analysis
The current rules for this challenge state that it should be
carried out three times in five minutes. A competitive run will collect all
fruit autonomously, without them touching the arena or being collected by hand.
A breakdown of this is as follows.
The tree is set at the start but must be reset twice during
the challenge, there are 12 fruit to be accurately located on the tree, with an
estimate of 5 seconds per fruit, resetting the tree will take 1 minute. This
may be practised and optimised to reduce this time but as a starting position,
two minutes of the five minute total will be reset time.
With three runs, there is therefore 1 minute to complete
each run.
With a basic tree visiting scenario, in which each quadrant
of the tree is visited once, there will be 5 movements by the chassis,
estimating 5 seconds per relocation, 25 seconds of the run will be chassis
movement time.
The 35 seconds remaining must be split four ways for each
quadrant which (with rounding) will be 9 seconds, and therefore picking time
per fruit is 3 seconds. Alternative strategies could be employed to pick two
quadrants simultaneously, leaving 15 seconds for movement and 45s second
picking, resulting in approximately 4 seconds per fruit.
Using an attachment which picked three fruits simultaneously
would give a picking operation available timing of 9 and 12 seconds
respectively.
Returning to the barn with a part load of fruit is probably
not an option, incurring a competitive time penalty of at least 10-15 seconds.
The chassis and attachment combination must be very stable
due to cornering to navigate the tree quickly.
The time for this challenge is very constrained and heavily
dependent upon the tree, fruit and attachment design.
Attachments
There are potentially three attachments involved here.
A storage trough to carry all collected fruit must have a
capacity of 768ml minimum, and unless the fruit are ordered in the trough in
some way, more than that. The bottom of the lowest fruit is at most 65mm from
the arena floor, the storage trough therefore has to be below this height, or a
separate attachment feature is required to load it with picked fruit.
As noted, the picked fruit must be transported to a
temporary storage ‘trough’ while a run is in progress. Higher fruit might be conveyed
by gravity, but the lowest fruit either must have the picker carryout the
transfer, a separate conveyor mechanism, or the trough placed lower than the
lowest fruit, 65mm. One option might be to position the trough below the tree
on the front of the chassis and the picker allows the fruit to drop into it. A
trough might also have a shaking mechanism to shake the picked fruit into a
more space efficient order.
The picker attachment must recognise an individual fruit,
grasp/pick a fruit, and transfer it to the trough in the time periods
specified. Multiple pickers either as individual operation or operation in
concert will either significantly reduce the time required or enable slower
picking methods. A multi-picker running at the same speed as a single picker
could pick all fruit in 12 seconds, potentially reducing the overall run time
to 37 seconds.
The picker must be able to reach the topmost fruit, at 350mm
high and be able to pick fruit with a side to side difference of 110 mm,
therefore a single picker will need to be able to extend over a wide range and
retract to within the 400mm length constraint. A multi-picker would make the robot at least
350mm high which might present stability issues.
The option to attach via magnets does provide the advantage
that reset times can be reduced by making it easier to hang fruit, as well as a
clean ‘pick’ action. Fruit using magnets may be attracted to other magnetic
materials in the robot or each other, thus causing jams, but also a storage
mechanism. The strength of a magnet may also make picking more difficult due to
increased force required. If used, magnets may require picking strength tuning.
The chassis navigation will likely be able to position the
picking attachments close to the tree and navigate from and to the barn, but
more precise positioning close to the tree may need to be done via additional
attachment-based sensors.
If the picker or conveyor can retain fruit, the last fruit
picked may not require transfer to the storage trough reducing picking time for
the final fruit.
The chassis must communicate to the attachment that it is in
the correct place to either begin the fine positional adjustments, or to begin
picking. The picking attachment must inform the chassis controller that the
picking is complete, and the relocation can begin.
Colouring the fruit would significantly aid visual
recognition. Can the fruit be distinctively coloured.
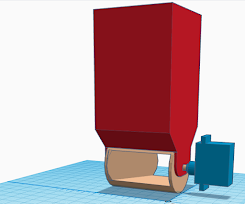
Hungry
Cattle
This challenge ‘must be run up to three times’ in five
minutes. This needs clarification as its not definite?
Time analysis
As before, there are two reset periods when the cattle
troughs are emptied, and the robot is refilled. Each trough must be filled with
at least 250ml of feed and therefore the robot must contain 750ml of feed. This
can be measured in advance but to be certain to adequately fill all troughs to
50%, a margin must be included. However, a reset is unlikely to be longer than
30 seconds if the used troughs are emptied back into the robot attachment or
emptied elsewhere and a measured amount used. This leaves 4 minutes for three
runs, or 80 seconds per run. There is also the option to prepare the feed by
loading enough for three runs before starting, meaning that only the troughs
have to be emptied, reducing the reset period to perhaps 20 seconds.
To locate each trough from the start would be around 10
seconds each, or 30 seconds, and 5 seconds to return to the barn, which places
the burden of the timing on the fill attachment. A mechanism to dispense feed
will operate most quickly with a wide mouth, but also less accurately, and
overfilling will use more time. Premeasuring the feed will speed up dispensing
it as with the measurement already completed, the feed can effectively be dropped
into the troughs.
Feed attachment scenarios.
Holding three runs of feed on the robot would require an
initial load of 2.25l of feed, which might be considered an impractical amount,
though not impossible.
A single hopper with valve could hold 750-800ml and dispense
250ml based on weight into each trough.
A single funnel could be fed from three premeasured hoppers,
dispensing feed via a latch on demand. The end of dispensing would need to be
detected
A timed run of 250ml of seed through a 1cm funnel hole took
10 seconds
A timed run of 250ml of seed through a 3cm ‘jar filler’ took
3 seconds
Three separate hoppers could be filled with feed each
dispensing to a trough directly.
If using the measured dispenser, dispensing time would be
30seconds in total.
If using multi-hopper with wide funnel would be 9 seconds,
but an end of dispensing detector would be required.
If using multi-hopper direct dispensing, dispensing would be
9 seconds, but the navigation would need to reposition to each hopper/trough
combination.
It is expected that each trough will be colour coded and
that the robot will navigate via a pre-seeded sequence/direction.
These scenarios consider only gravity feed systems, a forced
system may be much faster but require significant engineering. I.e. an
Archimedes screw.
The run times of 65 seconds and 44 seconds are
well within the required times. This challenge may very well become a simple
race between teams with the fastest chassis winning.
Attachments
This is the feed hopper and will deliver feed to the
troughs. The chassis navigation will need to deliver the hopper to the correct
locations and instruct the hopper to deliver the required feed. In turn, the
hopper attachment needs to communicate to the chassis that its task is complete.
This should be all that is required.
A single hopper is the easiest to position but gives slower
feed times.
A multi-hopper might be harder to position but gives faster
feed times.
Farmyard Tour
This is the only challenge which relies primarily on the
chassis performance only, and even then, only for remote control purposes. One
attachment from the Shepherds Pi challenge, the gate opener, might be reused as
there is a compulsory element of passing through a removable barrier. However,
this challenge relies heavily on the ‘offroad’ ability of the chassis, untested
in the arena, and the ability of the operator to control it.
While there is a time limit it is primarily there to limit
the time of the run and the whole challenge needs to be designed to fit within
the time limit. This will also require inventing a few ’jokes’ to entertain the
judges.
A range of attachments remote controlled might also add
novelty, such as firing a gun etc.
A trailer can be pulled to offer additional entertainment
and possibly contain features, the design of the chassis accommodating the
required pulling connection and adding the required pulling power.